Le tadalafil possède une affinité marquée pour la PDE5, mais épargne en grande partie les isoformes PDE1, PDE2 et PDE11, réduisant ainsi le risque d’effets extra-caverneux. L’action se traduit par une augmentation contrôlée de la circulation sanguine locale, indépendante des variations alimentaires. Sa pharmacocinétique repose sur une absorption digestive rapide, un métabolisme hépatique par CYP3A4 et une distribution tissulaire large. La biodisponibilité reste stable, et l’équilibre plasmatique est atteint en quelques jours lors d’administrations répétées. Les interactions cliniquement significatives surviennent avec les inhibiteurs puissants de CYP3A4 tels que le kétoconazole. Dans la littérature pharmacologique, acheter cialis 20 mg est souvent associé à des schémas d’utilisation basés sur la durée prolongée de son action.
Aa_mb_dr_aa_mb_dr_eurosensors_20120622_docx
Available online at www.sciencedirect.com
Procedia Engineering 00 (2012) 000–000
Proc. Eurosensors XXVI, September 9-12, 2012, Kraków, Poland
Comparison between Two Implementations of iCub’s
A. Ascia, M. Biso, L. Natale, D. Ricci, G. Metta, G. Sandini
Department of Robotics, Brain and Cognitive Sciences, Istituto Italiano di Tecnologia, Genova, Italy Abstract
Object grasping and manipulation in humanoid robots depend, for advanced and long lasting performance, on the development of reliable tactile sensors. Materials used for sensor implementation have to be chosen accurately and optimized in order to endow the device with sufficient resilience to endure long lasting grasping tasks. In particular care has to be taken when trying to enhance durability by the use of materials with high shore hardness as this choice can noticeably reduce pressure sensitivity. In this paper, a comparison between two implementations of the fingertip sensor of the humanoid robot iCub is presented by using a raw characterization of the response along a straight line. Prototypes differ in the materials used for the dielectric and protective layers, while maintaining the same capacitive architecture. The relevant result that emerges from the characterization is that the prototype with Soma Foama presents a higher sensitivity compared to the prototype in PDMS, while the second has a higher mechanical strength. 2012 Published by Elsevier Ltd. Keywords: Tactile sensors, human- robot interaction, capacitive pressure sensors
1. Introduction
Humans interact with the external world by using their sensory systems; in particular tactile and
kinesthetic systems provide information about position and physical interaction with the environment and about first impact contact, shape, roughness and positions of objects placed near them. In recent years, the development of artificial skin is becoming mandatory for the development of humanoid robots capable of safely interacting with the environment especially where human-robot interaction is needed [1]. Force feedback control, unsafe impact avoidance and object manipulation are examples of primary goals that a humanoid robot may achieve by the use of artificial tactile sensors employed in synergy with other
Author name / Procedia Engineering 00 (2012) 000–000
sensors (such us force sensors on the joints). In particular, the object manipulation requires the development of reliable tactile sensors able to obtain tactile images on the end effector of the robot.
2. Fingertip architecture
The fingertip sensor [2] is composed of a plastic support holding a PCB with twelve flat single plate
electrode capacitors connected to a commercial programmable capacitance to digital converter (CDC AD7147 from Analog Device[3]) also placed on the PCB. In order to detect deformations due to the interaction with any object during grasping, the architecture of the sensor needs the development of the following layered structure:
• First, a dielectric layer made with soft material. Mechanical deformation due to external pressure
on the soft dielectric material leads to capacitance variations on the corresponding plate electrode; therefore it is possible to detect pressures applied on the fingertip.
• Second, an isopotential layer above all electrodes placed on the PCB made with flexible and elastic
conductive fabric connected to the digital ground of the CDC by one flat pad on the PCB. This allows to detect interactions with conductive and non-conductive objects, therefore reducing noise coming from the environment.
• Third, a protective layer to increase fingertip sensor lifetime, also preventing perturbations on the
isopotential layer. For sake of manufacturing simplicity it is made with a soft dielectric material.
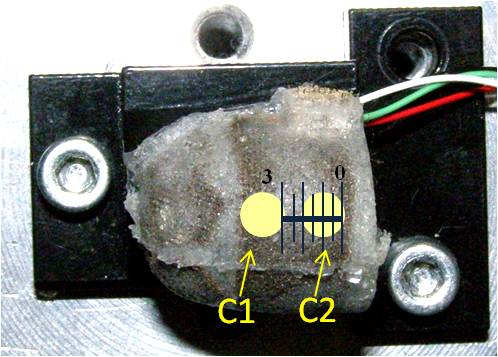
In this paper are presented two different fingertips that differ in the materials used for the crafting the first and third layer. In particular, Fig.1.a shows the prototype of the fingertip sensor that has the dielectric and protective layers made using Soma Foama 15 (from Smooth-On) while Fig.1.b shows the prototype of the fingertip sensor with the dielectric layer made using PDMS RTV 4524 (form Rhodorsil) and the protective layer made with Sylgard® 184 (from Dow Corning).
3. Fingertip comparison
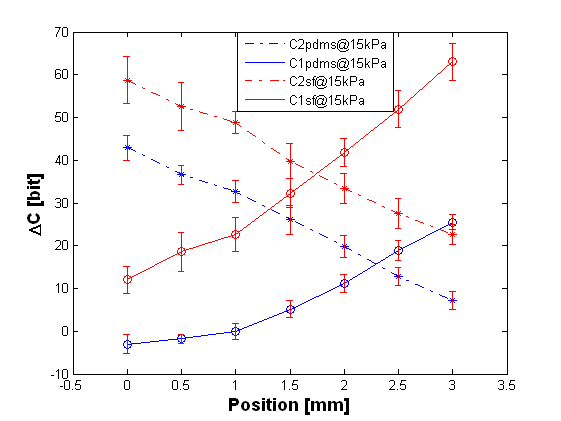
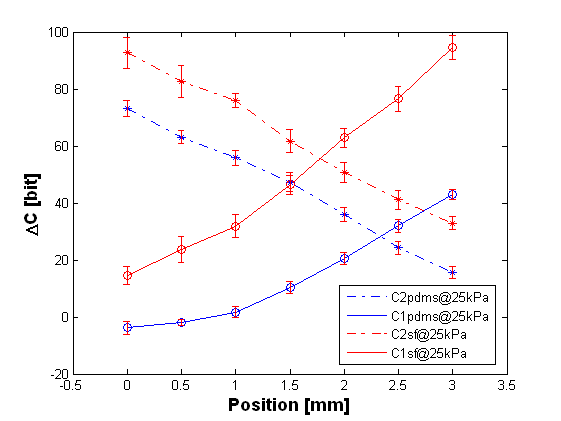
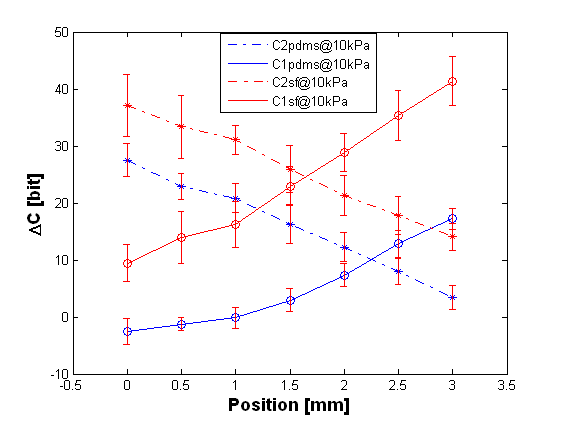
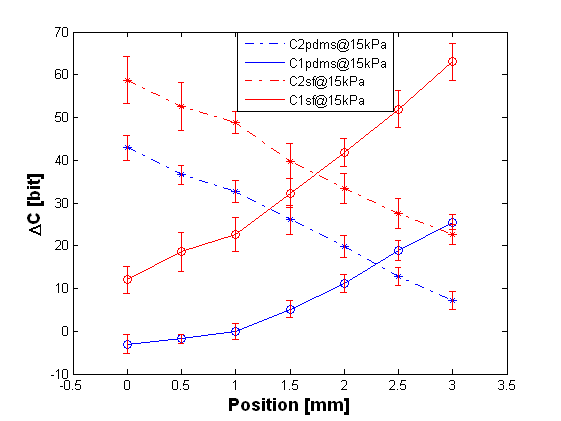
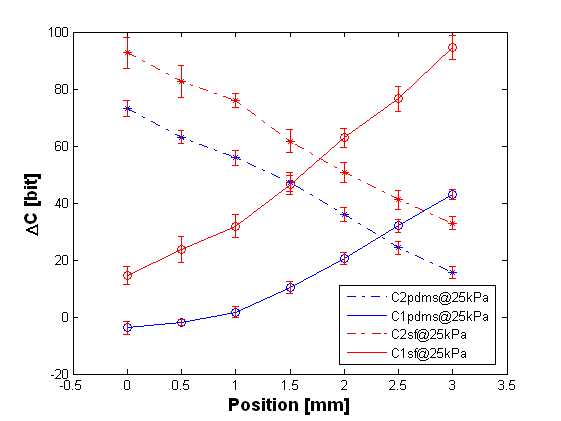
A Cartesian robot applied different pressures on different position by the use of a non conductive probe (with a diameter of 4mm) along one straight line (depicted on Fig.2) 3mm long with a step resolution of 0.5mm. A microcontroller has been used to collect data coming from the CDC and send them to a computer (PC). Each pressure has been applied for two seconds, with a repetition rate of 2 second. Moreover each pressure has been repeated fifty times in order to collect a significant dataset. Only two capacitors (C1 and C2) had a relevant variation during the whole test, therefore the characterization is related only to them. Fig.3 and Fig.4 show the mean value of the steady state response of capacitors for both materials used at a probe position of 1.5mm. The least square method has been used to fit polynomial models on each steady state response, afterwards the behavior of fingertip sensors when stressed with a fixed pressure has been estimated as shown in Fig 5, Fig. 6 and Fig. 7
4. Conclusions
Two different fingertip prototypes were presented. As can be observed in Fig. 3 and 4, that represent
the response of the two sensors as a function of the applied pressure, the prototype realized in Soma Foama has a greater sensitivity, while the one made in PDMS has a greater intrinsic strength due the material properties. Future efforts will be aimed at improving the sensitivity of the prototype made of
Author name / Procedia Engineering 00 (20121) 000–000
PDMS to obtain a higher transduction performance. A possible approach relies on the introduction of high dielectric constant powders (or liquids) in the elastomer.
Fig. 1. Photo of iCub’s Fingertip sensors with dielectric made with: Soma Foama (a) and PDMS (b).
Fig. 2 Schematic drawing of the straight line used for measurements.
C2 @1.5mm it] 40 [b C 30 Pressure [kPa]
Fig. 3. Variation of capacitor C2 as a function of the applied pressure for both materials used at position 1.5mm.
C1 @1.5mm it] [b C 20 Pressure [kPa]
Fig. 4.Variation of capacitor C1 as a function of the applied pressure for both materials used at position 1.5mm.
m / Procedia Engineering 00 (2012) 000–000 Acknowledgements This References [1] G. Cannata, R. S. Dahiya, M. Maggiali, F. Mastrogiovanni, G. Metta, M. Valle, Modular Skin for Humanoid Robot Systems,” in 4th Int. Conf. on Cognitive Systems, 2010.
[2] A. Schmitz, M. Maggiali, L. Natale, B. Bonino and G. Metta “A tactile sensor for the fingertip of the
o ots and Systems (IROS), 2010 IEEE/RSJ International Conference
on, pp.2212-2217, 18-22, Oct. 2010, doi: 10.1109/IROS.2010.5648838.
[3] A. Ascia, M. Biso, A. Ansaldo, A. Schmitz, D. Ricci, L. Natale, G, Metta, G. Sandini; , Improvement of tactile capacitive sensors of the humanoid robot iCub's fingertips, Sensors, 2011 IEEE , vol., no., pp.504-507, 28-31 Oct. 2011, doi: 10.1109/ICSENS.2011.6127098
Animal research highlights a therapeutic potential of cannabinoids for the treatment of depression Regina A. Mangieri Department of Pharmacology, The University of Texas at Austin, Austin, TX 78712, USA Abstract Long known for their mood altering effects, cannabinoids are currently under investigation for their therapeutic potential in the treatment of depression. Findings from multi
Examples of Eligible and Ineligible Expenses The following expenses are commonly requested for reimbursement from Flexible Spending Accounts (FSAs). This list is not comprehensive and is subject to change. In order for any expense to be eligible under your FSA, supporting documentation from your healthcare provider is required. Documentation must include: • the date the service was incurr
 Available online at www.sciencedirect.com
Procedia Engineering 00 (2012) 000–000
Proc. Eurosensors XXVI, September 9-12, 2012, Kraków, Poland
Comparison between Two Implementations of iCub’s
A. Ascia, M. Biso, L. Natale, D. Ricci, G. Metta, G. Sandini
Department of Robotics, Brain and Cognitive Sciences, Istituto Italiano di Tecnologia, Genova, Italy
Abstract
Available online at www.sciencedirect.com
Procedia Engineering 00 (2012) 000–000
Proc. Eurosensors XXVI, September 9-12, 2012, Kraków, Poland
Comparison between Two Implementations of iCub’s
A. Ascia, M. Biso, L. Natale, D. Ricci, G. Metta, G. Sandini
Department of Robotics, Brain and Cognitive Sciences, Istituto Italiano di Tecnologia, Genova, Italy
Abstract 

 Author name / Procedia Engineering 00 (20121) 000–000
PDMS to obtain a higher transduction performance. A possible approach relies on the introduction of high dielectric constant powders (or liquids) in the elastomer.
Fig. 1. Photo of iCub’s Fingertip sensors with dielectric made with: Soma Foama (a) and PDMS (b).
Fig. 2 Schematic drawing of the straight line used for measurements.
C2 @1.5mm
Author name / Procedia Engineering 00 (20121) 000–000
PDMS to obtain a higher transduction performance. A possible approach relies on the introduction of high dielectric constant powders (or liquids) in the elastomer.
Fig. 1. Photo of iCub’s Fingertip sensors with dielectric made with: Soma Foama (a) and PDMS (b).
Fig. 2 Schematic drawing of the straight line used for measurements.
C2 @1.5mm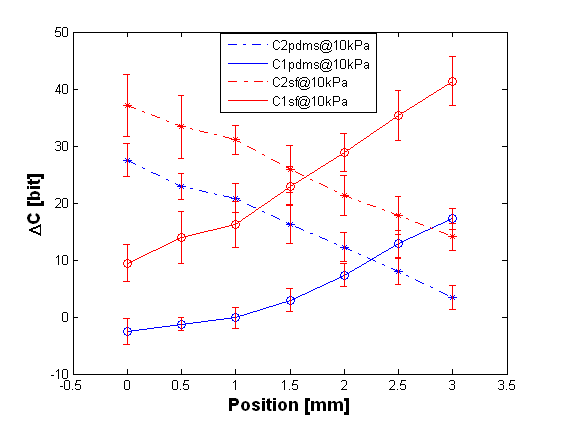
 m / Procedia Engineering 00 (2012) 000–000
m / Procedia Engineering 00 (2012) 000–000